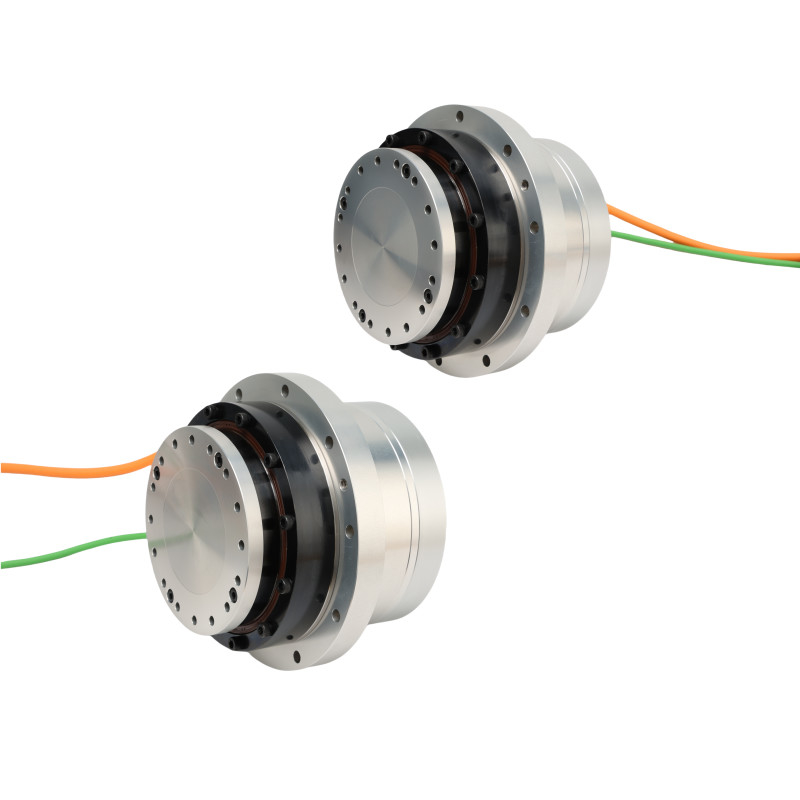
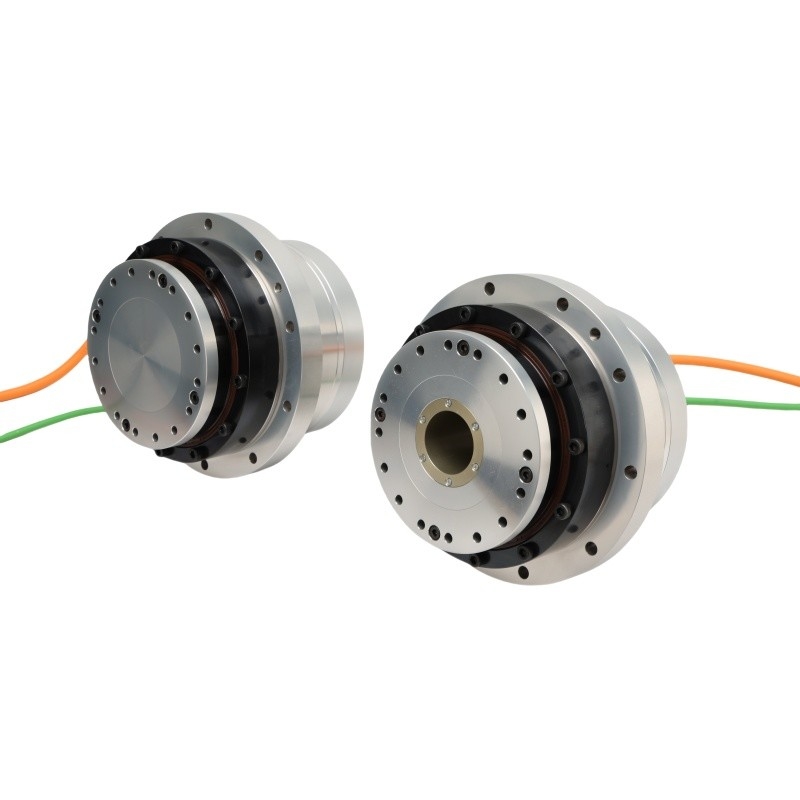
Wysokiej dokładności i dużego momentu obrotowego układ obrotowy HASF serii 20
Opis produktu
Siłowniki obrotowe to urządzenia mechaniczne zaprojektowane do wytwarzania ruchu obrotowego lub momentu obrotowego wokół osi centralnej.i innych zastosowań, w których wymagane jest sterowane ruchy obrotowe.
Zastosowanie
Automatyka przemysłowa
1Ramiona robotyczne: Aktywatory obrotowe są integralnymi komponentami ramion i manipulatorów robotycznych stosowanych na liniach montażowych, operacjach pick-and-place i innych zautomatyzowanych zadaniach.
2Przesyłki i obróbka materiałów: Przesyłki sterują ruchami obrotowymi w systemach przenośników, mechanizmach sortowania i sprzęcie do obróbiania materiałów.
3. Maszyny do pakowania: Aktuatory ułatwiają ruchy obrotowe w maszynach do pakowania do takich zadań, jak uszczelnianie, etykietowanie i napełnianie.
Przemysł motoryzacyjny
1Systemy kierownicze: W elektrycznych i hydraulicznych układach sterujących oraz w hydraulicznych układach sterujących (HPS) stosowane są elektryczne i hydrauliczne aktywatory obrotowe w celu wspomagania sterowania.
2Kontrola akcesoriów: Aktorzy służą do sterowania pozycją zaworu akcesoriów w nowoczesnych silnikach, zapewniając precyzyjną kontrolę prędkości obrotowej i mocy wyjściowej silnika.
3Systemy transmisji:Siłowniki obrotowe są stosowane w automatycznych skrzyniach biegów ręcznych (AMT) i skrzyniach biegów z podwójnym sprzęgłem (DCT) w celu ułatwienia zmiany biegów.
Energetyka i użytkownictwo:
1. Aktywacja zaworu: Aktywatory obrotowe sterują zawory w rurociągach, przemysłach procesowych i urządzeniach użyteczności publicznej w celu regulowania natężenia przepływu, ciśnienia i kierunku płynu.
2Energii odnawialnej: Aktuatory są używane w systemach śledzenia energii słonecznej w celu ukierunkowania paneli słonecznych w kierunku słońca w celu optymalnego wychwytywania energii.
Lekarstwo i opieka zdrowotna:
1Sprzęt diagnostyczny: Aktuatory obrotowe są stosowane w urządzeniach medycznych, takich jak skanery CT i maszyny MRI, do precyzyjnego pozycjonowania i ruchu komponentów obrazowania.
2Robotika chirurgiczna: Aktuatory umożliwiają precyzyjne ruchy i sterowanie systemami chirurgicznymi, zwiększając precyzję chirurgiczną i minimalnie inwazyjne procedury.
Artykuł specyfikacji
| Zestaw MA |
20 |
| Współczynnik redukcji |
51 |
81 |
101 |
121 |
161 |
| 220VAC |
Najwyższy moment obrotowy |
N·m |
69 |
91 |
102 |
108 |
113 |
| Moment obrotowy nominalny |
N·m |
30 |
48 |
58 |
61 |
61 |
| Maksymalna prędkość |
obroty / min |
98 |
62 |
50 |
41 |
31 |
| Prędkość nominalna |
obroty / min |
51 |
32 |
26 |
21 |
16 |
| Maksymalny prąd |
Zbroje |
6.04 |
5.02 |
4.51 |
3.98 |
3.13 |
| Prąd nominalny |
Zbroje |
2.63 |
2.65 |
2.56 |
2.25 |
1.69 |
| Stała momentu obrotowego |
N m/Ramiona |
11.42 |
18.14 |
22.62 |
27.1 |
36.06 |
| Oporność fazowa |
Ohm ((20°C) |
6.2 |
| Indukcja fazowa |
mH |
7.7 |
| Wsteczne EMF |
Vrms/krpm |
25 |
| 48VDC |
Najwyższy moment obrotowy |
N·m |
69 |
91 |
102 |
108 |
113 |
| Moment obrotowy nominalny |
N·m |
39 |
58 |
61 |
61 |
61 |
| Maksymalna prędkość |
obroty / min |
86 |
54 |
44 |
36 |
27 |
| Prędkość nominalna |
obroty / min |
51 |
32 |
26 |
21 |
16 |
| Maksymalny prąd |
Zbroje |
15.37 |
12.77 |
11.48 |
10.14 |
7.98 |
| Prąd nominalny |
Zbroje |
8.69 |
8.14 |
6.86 |
5.73 |
4.31 |
| Stała momentu obrotowego |
N m/Ramiona |
4.49 |
7.13 |
8.89 |
10.65 |
14.17 |
| Oporność fazowa |
Ohm ((20°C) |
0.4 |
| Indukcja fazowa |
mH |
0.9 |
| Wsteczne EMF |
Vrms/krpm |
7.7 |
| Absolute Encoder |
Rodzaj kodera |
Koder absolutny |
| Rozdzielczość (jednorazowe obroty silnika) |
trochę |
23,24 bitów |
| Silnik licznik wielokrotności |
trochę |
16 |
| Jednoręczna dokładność pozycji |
Sekcja łukowa |
≤ 75 |
≤ 75 |
≤ 60 |
≤ 50 |
≤ 50 |
| Powtarzalność dokładności pozycjonowania |
Sekcja łukowa |
≤ 10 |
≤ 10 |
≤ 10 |
≤ 10 |
≤ 10 |
| Sztywność przewracania |
x104N·m /rad |
24 |
| sztywność torsyjna |
x104N·m /rad |
1.8 |
2.3 |
| Moment bezwładności |
Bez hamulca |
kg*m2 |
8.8*10^-5 |
| Z hamulcem |
kg*m2 |
9.17*10^-5 |
| Masę |
Bez hamulca |
Kilogramowo |
2.4 |
| Z hamulcem |
Kilogramowo |
2.96 |
| Liczba słupów silnika |
Włóczęga |
16 |
| Warunki otoczenia |
Temperatura pracy: 0~40°C
Temperatura przechowywania: -20~60°C
wilgotność operacyjna/wilgotność magazynowa: 20~80% RH (bez kondensacji)
Odporność drgań: 24,5 m/s2 (częstotliwość: 10~400 Hz)
Brak pyłu lub proszku metalowego, gazów żrących, gazów łatwopalnych, mgły olejowej i innych zastosowań w pomieszczeniach zamkniętych, unikaj bezpośredniego światła słonecznego
Poniżej 1000 m wysokości |
| Izolacja silnika |
Oporność izolacyjna: większa niż 100MΩ ((DC500V) |
| Siła dielektryczna: AC1500V/ 1 minuta |
| Klasa izolacji: F |
| Stopień ochrony |
Typ całkowicie zamknięty, samochłodzony (IP65) |


 Twoja wiadomość musi mieć od 20 do 3000 znaków!
Twoja wiadomość musi mieć od 20 do 3000 znaków!