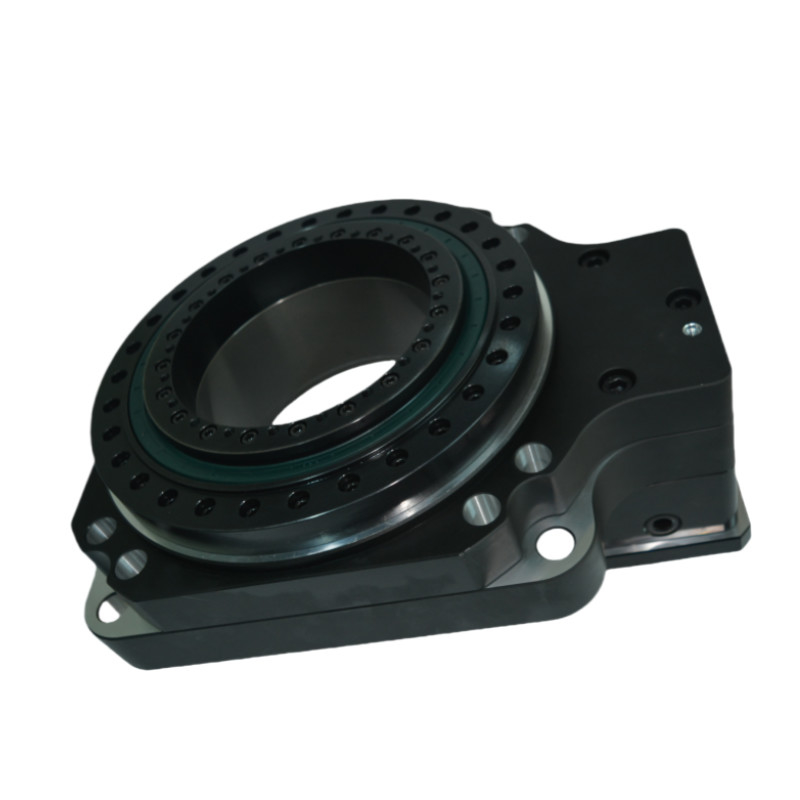
HRG serii 130Pusty stolik obrotowy
Pustka platforma obrotowa jest zaawansowanym urządzeniem mechanicznym zaprojektowanym do precyzyjnych zastosowań ruchu rotacyjnego.zwiększenie jego wszechstronności w różnych ustawieniach.
Kluczowe cechy
Wysoka precyzja:
Osiąga dokładność pozycjonowania powtarzanego poniżej 5 sekund łukowych, zapewniając niezawodną wydajność w wymagających zastosowaniach.
Wysoka sztywność:
Podtrzymywana przez precyzyjne łożyska z przekroczonymi rolkami, platforma może wytrzymać znaczne siły promieniowe, osiowe i przewracanie, zapewniając ponad dziesięć razy sztywność tradycyjnych łożysk.
Elastyczna kompatybilność silnika:
Łatwo konfigurowalne w celu dopasowania różnych marek i typów silników, w tym serwomotory i silniki stopniowe, za pomocą dostosowywalnych flans i wałów wejściowych.
Wydajny moment obrotowy:
Wykorzystuje jednoetapowy mechanizm redukcji biegów spiralnych w celu zwiększenia momentu obrotowego, przy czym biegów oceniano poniżej poziomu 5 dla precyzji.
Wygodne ładowanie:
Powierzchnia platformy umożliwia bezpośrednie zablokowanie części roboczych, usprawniając proces załadunku i zwiększając wydajność operacyjną.
Bezproblemowa eksploatacja:
Zaprojektowane do stabilnego i płynnego obrotu, zapewniające szybkie ustawienie pozycji i minimalne drgania podczas pracy.
Niezawodna konstrukcja:
Zbudowany tak, aby wytrzymać różne obciążenia operacyjne przy zachowaniu wysokiej wydajności, co czyni go odpowiednim do zastosowań przemysłowych i automatycznych.
Pustka platforma obrotowa jest idealna do zastosowań wymagających wysokiej precyzji, elastyczności i wytrzymałości, co czyni ją cennym atutem w przemyśle robotycznym, produkcyjnym i automatycznym.
 |
Model |
Specyfikacja |
Średnica otworu |
Wskaźnik |
| (mm) |
(mm) |
|
HRG130-06K
HRG130-10K
HRG130-18K
|
130 |
62 |
6
10
18
|
Parametry wydajności
| HRG130-06/10/18K |
| Wsparcie platformy wyjściowej |
łożyska z rurociągów krzyżowych |
Dopuszczalna prędkość wyjścia |
200 obr./min. |
Inercja obrotowa |
2772x10-6 kg.m2 |
| Zmiana ruchu |
360° ((obrót pod każdym kątem) |
Dokładność pozycjonowania powtarzalnego |
±15 sekundy łukowej |
Dokładność pozycjonowania |
≤ 30 sekund łukowych |
| Odpowiedni silnik (rozmiar) |
/ |
Dopuszczalne obciążenie osiowe |
2000N |
Zmiany węgla |
Tłuszcz syntetyczny |
| Wskaźnik redukcji |
18 |
Dopuszczalne obciążenie promieniowe |
1200N |
temperatura pracy |
¥-10°C~90°C |
| Narysowany moment wyjściowy |
25NM |
Równoległość platformy wyjściowej |
00,02 mm |
Życie w służbie |
20000h |
| Maksymalny moment przyspieszenia |
45NM |
Wypływ powierzchni platformy wyjściowej |
00,01 mm |
Poziom produkcji |
IP65 |
| Moment awaryjnego zatrzymania |
75NM |
Wyjście z obwodów platformy wyjściowej |
00,01 mm |
Poziom hałasu |
≤ 65 dB |
| HRG130-18K Pustka Maszyna z bezpośrednim połączeniem All-in-one |
| Wsparcie platformy wyjściowej |
łożyska z rurociągów krzyżowych |
Dopuszczalna prędkość wyjścia |
200 obr./min. |
Inercja obrotowa |
2772x10-6 kg.m2 |
| Zmiana ruchu |
360° ((obrót pod każdym kątem) |
Dokładność pozycjonowania powtarzalnego |
±15 sekundy łukowej |
Dokładność pozycjonowania |
≤ 30 sekund łukowych |
| Odpowiedni silnik (rozmiar) |
Środki odnośne: |
Dopuszczalne obciążenie osiowe |
2000N |
Zmiany węgla |
Tłuszcz syntetyczny |
| Wskaźnik redukcji |
6 |
10 |
18 |
Dopuszczalne obciążenie promieniowe |
1200N |
temperatura pracy |
¥-10°C~90°C |
| Narysowany moment wyjściowy |
43NM |
34NM |
25NM |
Równoległość platformy wyjściowej |
00,02 mm |
Życie w służbie |
20000h |
| Maksymalny moment przyspieszenia |
77.4NM |
61.2NM |
45NM |
Wypływ powierzchni platformy wyjściowej |
00,01 mm |
Poziom produkcji |
IP65 |
| Moment awaryjnego zatrzymania |
129NM |
102NM |
75NM |
Wyjście z obwodów platformy wyjściowej |
00,01 mm |
Poziom hałasu |
≤ 65 dB |
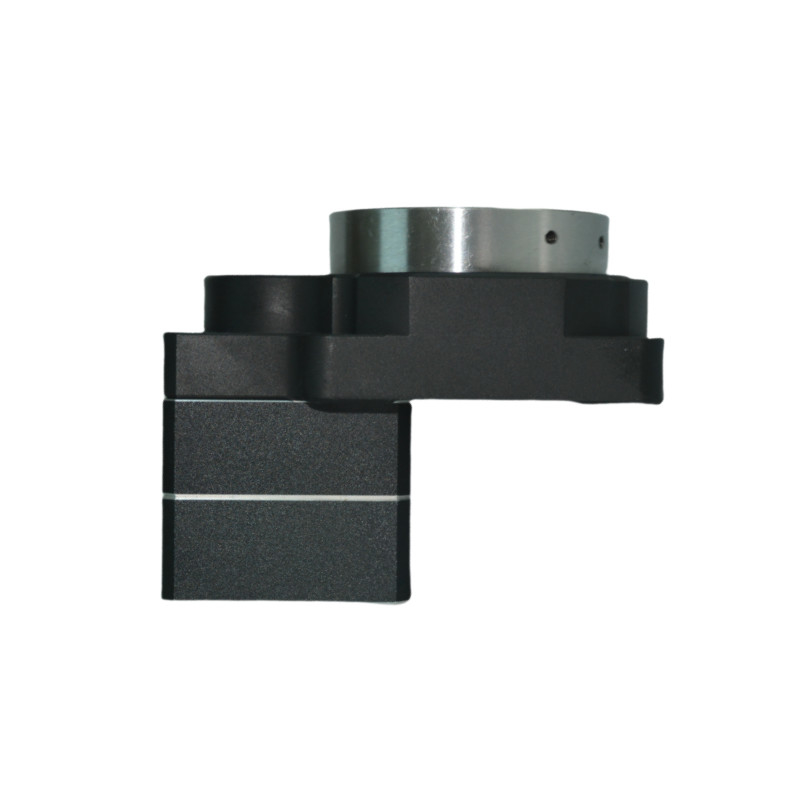
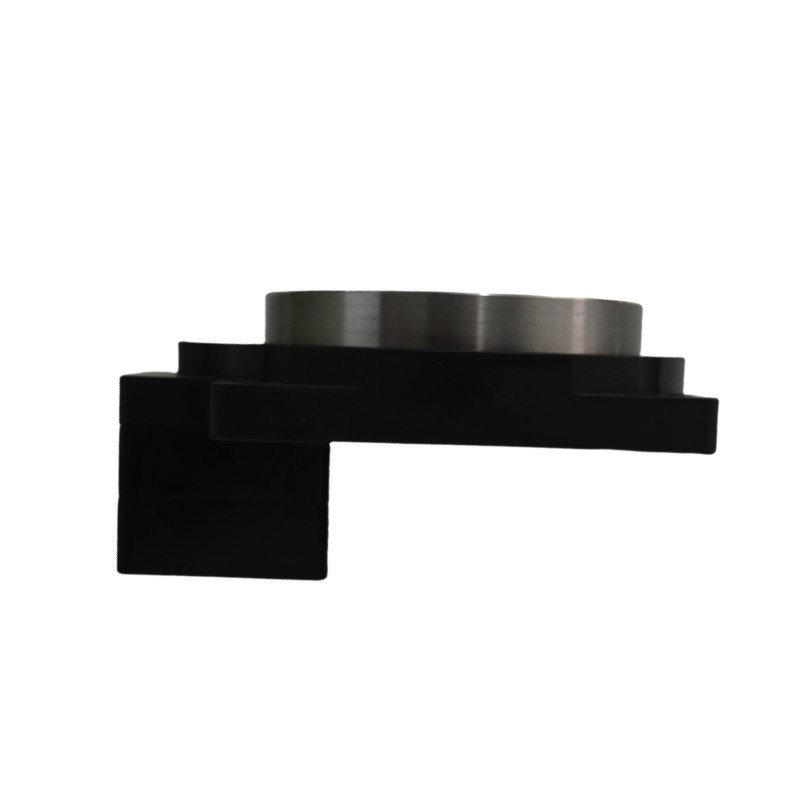
Szczegółowe obrazy
Rysunki
Instrukcje montażu dla pustego stołu obrotowego
Zastosowania platformy rotacyjnej w powietrzu pustym
Robotyka:
Wykorzystywane w rękach i manipulacjach robotycznych w celu precyzyjnego pozycjonowania i ruchu w zadaniach montażowych i obsługi materiałów.
Systemy automatyki:
Zintegrowane z zautomatyzowanymi liniami produkcyjnymi do zadań takich jak sortowanie, pakowanie i paletowanie, w których dokładne ruchy rotacyjne są niezbędne.
Obróbka CNC:
Stosowane w maszynach CNC do precyzyjnego obrotu części roboczych podczas frezowania, wiercenia i obracania.
Sprzęt medyczny:
Używane w urządzeniach medycznych, takich jak systemy obrazowania, roboty chirurgiczne i automatyka laboratoryjna do dokładnego pozycjonowania i ruchu.
Lotnictwo kosmiczne i obrona:
Stosowane w symulatorze lotu, systemach radarowych i bezzałogowych statkach powietrznych w celu dokładnej orientacji i stabilizacji.
Działania telekomunikacyjne:
Używane w systemach pozycjonowania anten w celu zapewnienia dokładnego wyrównania dla optymalnej transmisji sygnału.
Badanie i pomiar:
Zintegrowane w urządzeniach badawczych do obrotowych próbek lub komponentów w celu oceny wydajności w różnych warunkach.
Rozrywka i media:
Używane w aparatach fotograficznych i systemach oświetlenia do płynnego i kontrolowanego ruchu w produkcji filmowej i na żywo.
Urządzenia przemysłowe:
Stosowane w przenośnikach i systemach sortowania, w których potrzebne jest ruch obrotowy w celu skutecznego obróbki materiału.
Badania i rozwój:
Używane w laboratoriach i obiektach badawczych do instalacji eksperymentalnych wymagających precyzyjnych regulacji kątowych.
Opakowanie i wysyłka

 Twoja wiadomość musi mieć od 20 do 3000 znaków!
Twoja wiadomość musi mieć od 20 do 3000 znaków!