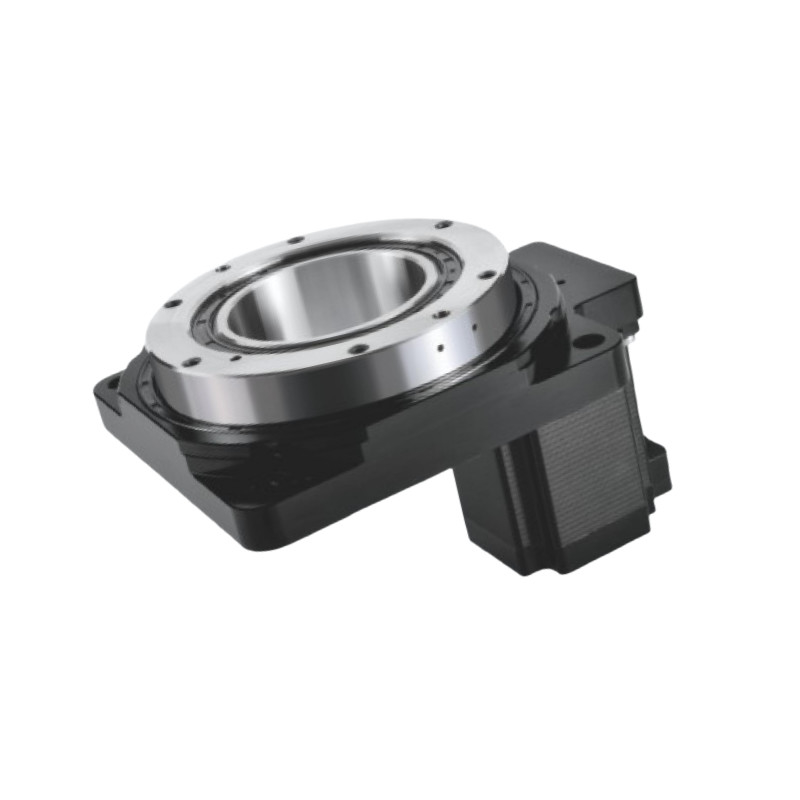
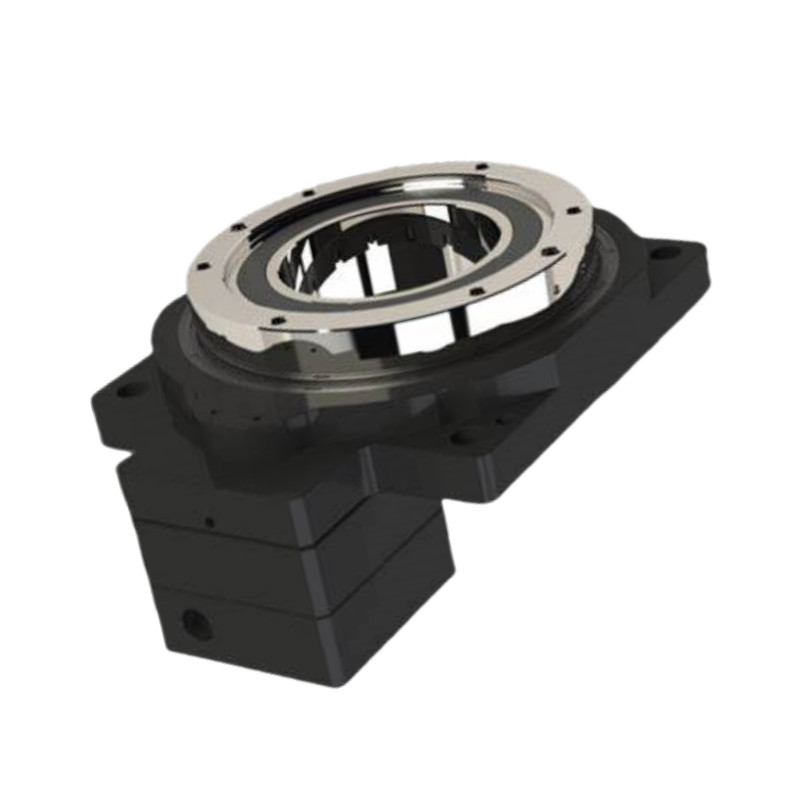
HRG serii 200Pusty stolik obrotowy
Pustka platforma obrotowa jest mechanicznym urządzeniem zaprojektowanym w celu zapewnienia precyzyjnego ruchu obrotowego, umożliwiając jednocześnie przejście kabli, rur lub innych komponentów przez jego środek.Ten wyjątkowy projekt ma kilka zalet, w tym zwiększona wszechstronność i wygodność w różnych zastosowaniach.
Struktura pustej platformy obrotowej
Podstawowa ramka:
Podstawowe wsparcie, w którym znajdują się wszystkie pozostałe elementy, zapewnia stabilność i sztywność całej konstrukcji.
Rotacyjny dysk:
Główną platformę, która obraca się wokół centralnej osi.
Środek pusty:
Centralne otwarcie, które umożliwia przejście kabli, rur lub innych komponentów, umożliwiając czystsze instalacje i łatwiejsze kierowanie.
Łożyska rurowe krzyżowe:
Precyzyjne łożyska, które wspierają obrotowy dysk. Ich konfiguracja pozwala na wysoką zdolność obciążeniową i sztywność, zapewniając płynne obrót.
Mechanizm napędowy:
Obejmuje to silnik (zwykle serwo lub silnik krokany) i powiązane z nim przekładnie (takie jak przekładnie spiralne), które zapewniają niezbędny moment obrotowy i kontrolę obrotu.
Zmiennego rodzaju mechanizm odprawy:
System umożliwiający precyzyjne ustawianie przedziału między biegami w celu zminimalizowania reakcji i zwiększenia dokładności pozycjonowania.
Włókno wejściowe i obudowa:
Komponenty łączące silnik z platformą.
Interfejs sterowania:
Elektroniczne elementy lub systemy zarządzające działaniem silnika, zapewniające kontrolę prędkości obrotu, kierunku i pozycji.
Punkty mocowania:
Miejsca na platformie do mocowania części roboczych lub urządzeń, zapewniające stabilność podczas pracy.
Parametry wydajności
| HRG200-10K |
| Wsparcie platformy wyjściowej |
łożyska z rurociągów krzyżowych |
Dopuszczalna prędkość wyjścia |
200 obr./min. |
Inercja obrotowa |
27169x10-6 kg.m2 |
| Zmiana ruchu |
360° ((obrót pod każdym kątem) |
Dokładność pozycjonowania powtarzalnego |
±15 sekundy łukowej |
Dokładność pozycjonowania |
≤ 30 sekund łukowych |
| Odpowiedni silnik (rozmiar) |
Φ19-Φ70-Φ90-M6 |
Dopuszczalne obciążenie osiowe |
4000N |
Zmiany węgla |
Tłuszcz syntetyczny |
| Wskaźnik redukcji |
10 |
Dopuszczalne obciążenie promieniowe |
2500N |
temperatura pracy |
-10°C~90°C |
| Narysowany moment wyjściowy |
112NM |
Równoległość platformy wyjściowej |
00,02 mm |
Życie w służbie |
20000h |
| Maksymalny moment przyspieszenia |
201.6NM |
Wypływ powierzchni platformy wyjściowej |
00,01 mm |
Poziom produkcji |
IP65 |
| Moment awaryjnego zatrzymania |
336NM |
Wyjście z obwodów platformy wyjściowej |
00,01 mm |
Poziom hałasu |
≤ 65 dB |
| HRG200-18K |
| Wsparcie platformy wyjściowej |
łożyska z rurociągów krzyżowych |
Dopuszczalna prędkość wyjścia |
200 obr./min. |
Inercja obrotowa |
27169x10-6 kg.m2 |
| Zmiana ruchu |
360° ((obrót pod każdym kątem) |
Dokładność pozycjonowania powtarzalnego |
±15 sekundy łukowej |
Dokładność pozycjonowania |
≤ 30 sekund łukowych |
| Odpowiedni silnik (rozmiar) |
Φ19-Φ70-Φ90-M6 |
Dopuszczalne obciążenie osiowe |
4000N |
Zmiany węgla |
Tłuszcz syntetyczny |
| Wskaźnik redukcji |
18 |
Dopuszczalne obciążenie promieniowe |
2500N |
temperatura pracy |
-10°C~90°C |
| Narysowany moment wyjściowy |
85NM |
Równoległość platformy wyjściowej |
00,02 mm |
Życie w służbie |
20000h |
| Maksymalny moment przyspieszenia |
153NM |
Wypływ powierzchni platformy wyjściowej |
00,01 mm |
Poziom produkcji |
IP65 |
| Moment awaryjnego zatrzymania |
680NM |
Wyjście z obwodów platformy wyjściowej |
00,01 mm |
Poziom hałasu |
≤ 65 dB |
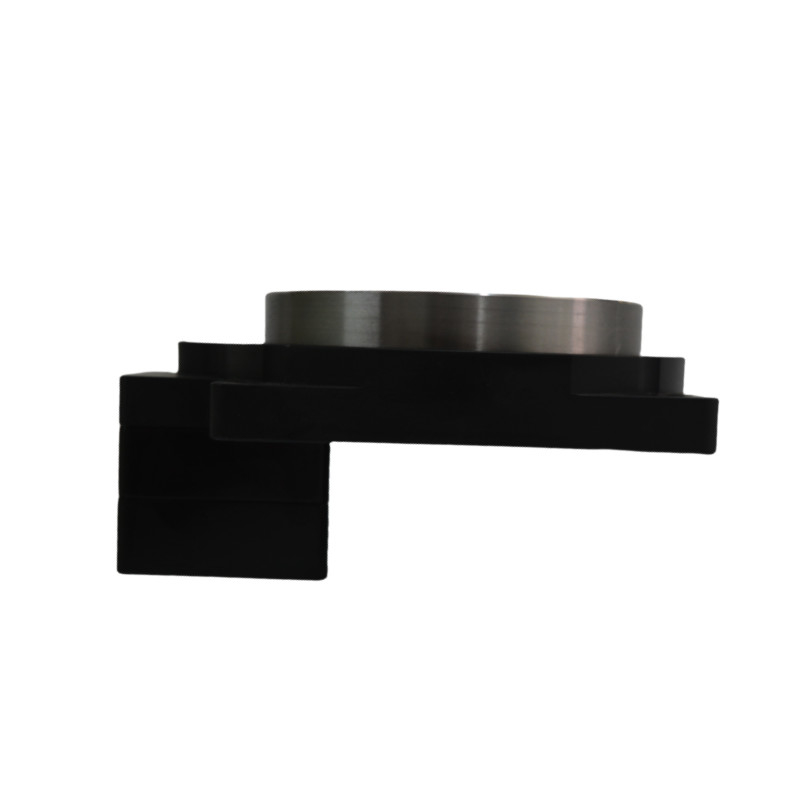
Rysunki

Instrukcje montażu dla pustego stołu obrotowego
Zastosowania platformy rotacyjnej w powietrzu pustym
Robotyka:
Wykorzystywane w rękach i manipulacjach robotycznych w celu precyzyjnego pozycjonowania i ruchu w zadaniach montażowych i obsługi materiałów.
Systemy automatyki:
Zintegrowane z zautomatyzowanymi liniami produkcyjnymi do zadań takich jak sortowanie, pakowanie i paletowanie, w których dokładne ruchy rotacyjne są niezbędne.
Obróbka CNC:
Stosowane w maszynach CNC do precyzyjnego obrotu części roboczych podczas frezowania, wiercenia i obracania.
Sprzęt medyczny:
Używane w urządzeniach medycznych, takich jak systemy obrazowania, roboty chirurgiczne i automatyka laboratoryjna do dokładnego pozycjonowania i ruchu.
Lotnictwo kosmiczne i obrona:
Stosowane w symulatorze lotu, systemach radarowych i bezzałogowych statkach powietrznych w celu dokładnej orientacji i stabilizacji.
Działania telekomunikacyjne:
Używane w systemach pozycjonowania anten w celu zapewnienia dokładnego wyrównania dla optymalnej transmisji sygnału.
Badanie i pomiar:
Zintegrowane w urządzeniach badawczych do obrotowych próbek lub komponentów w celu oceny wydajności w różnych warunkach.
Rozrywka i media:
Używane w aparatach fotograficznych i systemach oświetlenia do płynnego i kontrolowanego ruchu w produkcji filmowej i na żywo.
Urządzenia przemysłowe:
Stosowane w przenośnikach i systemach sortowania, w których potrzebne jest ruch obrotowy w celu skutecznego obróbki materiału.
Badania i rozwój:
Używane w laboratoriach i obiektach badawczych do instalacji eksperymentalnych wymagających precyzyjnych regulacji kątowych.
Opakowanie i wysyłka

 Twoja wiadomość musi mieć od 20 do 3000 znaków!
Twoja wiadomość musi mieć od 20 do 3000 znaków!