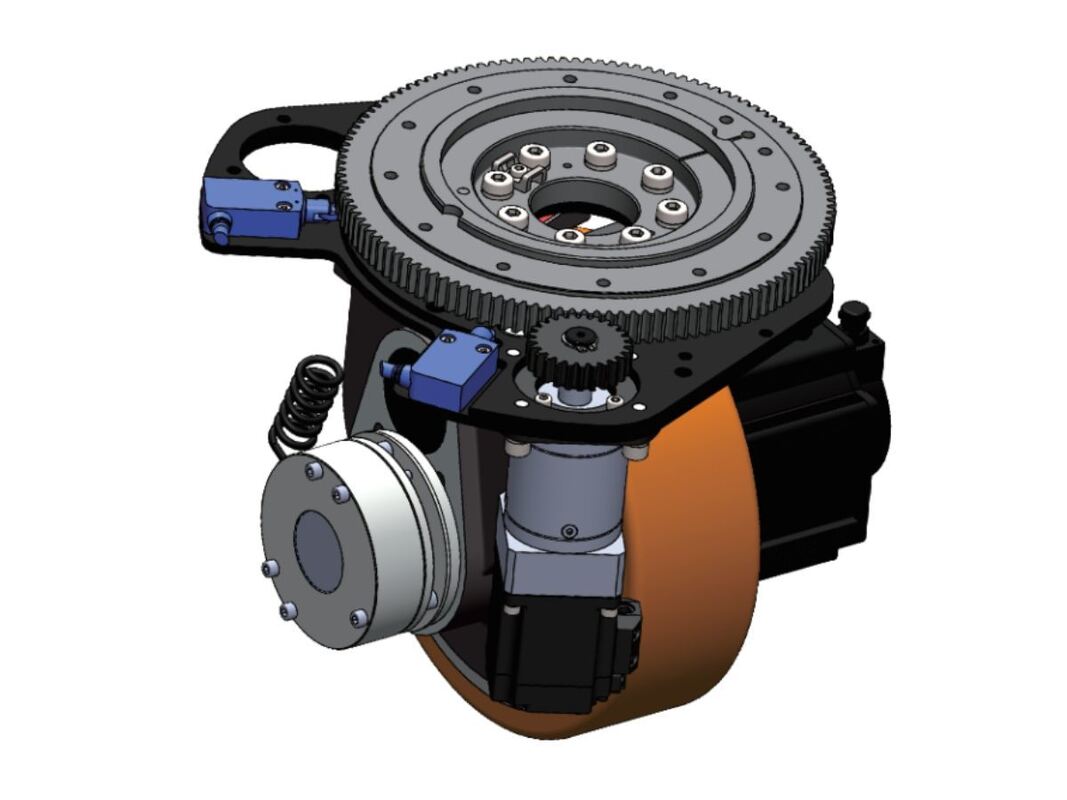
Opis modułu kierownicy AGV 360° Horizontal Drive
Głównym elementem systemu sterowania jest silnik kierowniczy, mechanizm redukcji biegów, urządzenie zwrotne pozycji, urządzenie ograniczające,i mechanizm obrotowy, wszystko w kompaktowym module.
W połączeniu z sterownikiem napędu mobilna platforma wyposażona w pojedynczy kierownicę może wykonywać polecenia start/stop, przesuwać się do przodu lub do tyłu oraz kierować.
Wykorzystanie dwóch lub więcej kół kierowniczych zwiększa możliwości systemu, umożliwiając skręty o promieniu zerowym, przesunięcia boczne, obrót 360° we wszystkich kierunkach, ruch w linii prostej, ruch boczny,przebieg diagonalny, i zakrzywione ścieżki, ułatwiające nieograniczony ruch w dowolnym kierunku na powierzchni dwuwymiarowej.
Właściwości modułu kierownicy AGV z napędem poziomym 360°
Bezpieczna eksploatacja
Do monitorowania prędkości i podłączenia do sterownika bezpieczeństwa można zintegrować zewnętrzny koder bezpieczeństwa.
Produkt jest zgodny z przepisami bezpieczeństwa UE, w tym normami CE i IEC.
Stabilny i niezawodny
Niska wysokość instalacji, wysoka precyzja, lekka konstrukcja, duża pojemność, duży moment obrotowy i duża prędkość.
System zapewnia niezawodną wydajność i długą żywotność.
Łatwe utrzymanie
Kompatybilny z łańcuchami inAGV* wykorzystującymi kabły o wysokiej elastyczności (moc, sprzęt zwrotny, komunikacja i uruchomienie), z żywotnością wygięcia przekraczającą 10 milionów cykli.
Stabilne i niezawodne złącza umożliwiają instalację plug-and-play, eliminując skomplikowane okablowanie.
Projekcja osłony 360° zapewnia silną zdolność przeciwdziałania zakłóceniom i niezawodną, bez strat transmisję sygnału.
Wsparcie ukierunkowane na rozwiązania
W zależności od wymagań aplikacji możemy polecić sprawdzone w branży systemy nawigacji i sterowania, w tym:LiDAR SLAM / Visual SLAM,nawigacja elektromagnetyczna,nawigacja taśmą magnetyczną,Nawigacja w paskach kolorowychNawigacja teksturowa,nawigacja magnetyczna +nawigacja inercyjna,nawigacja satelitarna GPS/BeiDou.i etapy operacyjne.
Specyfikacja modułu kierownicy AGV z napędem poziomym 360°
| Model |
PH150DS-A1 |
PH150DS-A2 |
PH190DS-A2 |
PH205DS-A1 |
PH210DS-A1 |
PH250DS-A1 |
PH270DS-A1 |
PH270DS-A2 |
| Jednostka napędowa (koło napędowe horyzontalne) |
| Model koła napędowego |
PH150D-A1 |
PH150D-A2 |
PH190D-A2 |
PH205D-A1 |
PH210D-A1 |
PH250D-A1 |
PH270D-A1 |
PH270D-A2 |
| Średnica koła 150mm 150mm 190mm 205mm 210mm 250mm 270mm 270mm |
| Wskaźnik wyposażenia do jazdy |
10-17 lat.5 |
16-24-34 |
20 |
16-32 |
24.7 |
17-32 |
17-32 |
16-40 |
| Pojemność obciążenia pionowego |
300-400 kg |
600 kg |
900 kg |
|
1150 kg |
1000 kg |
1175 kg |
|
1500 kg |
2500 kg |
| Zakres mocy |
0.2-0.5KW |
00,4-0,75 kW |
00,75-1,0 kW |
1.0-2.0KW |
00,5-1,2 kW |
10,0-2,5 kW |
10,0-2,5 kW |
10,0-3,0 kW |
| Prędkość koła napędowego 0-7 km/h 0-5 km/h |
0-5km/h |
0-5km/h 0-5km/h 0-10km/h 0-10km/h 0-10km/h |
| Moment obrotowy koła napędowego |
Max: 48 N.m. |
Max: 280N.m |
Max: 210N.m. |
Max: 440N.m. |
MAX: 235N.m |
Max: 450N.m |
Max: 450N.m |
Max: 800N.m |
| Jednostka sterująca |
| Zakres mocy |
00,05 kW |
00,1-0,2 kW |
00,1-0,2 kW |
00,4 kW |
00,1-0,2 kW |
0.2-0.4KW |
00,4 kW |
00,75 kW |
Czujnik kąta, koder przyrostowy i koder absolutny
Granica kierownicy |
Koder przyrostowy i absolutny |
| Granica kierownicy |
Elektroniczny i mechaniczny limit |
Informacje zawarte w tej tabeli mają charakter jedynie odniesienia.
W celu określenia konkretnego modelu prosimy o kontakt z inżynierami aplikacyjnymi.
Dostosowanie jest obsługiwane. |

 Twoja wiadomość musi mieć od 20 do 3000 znaków!
Twoja wiadomość musi mieć od 20 do 3000 znaków!